

自控系统上位机开发
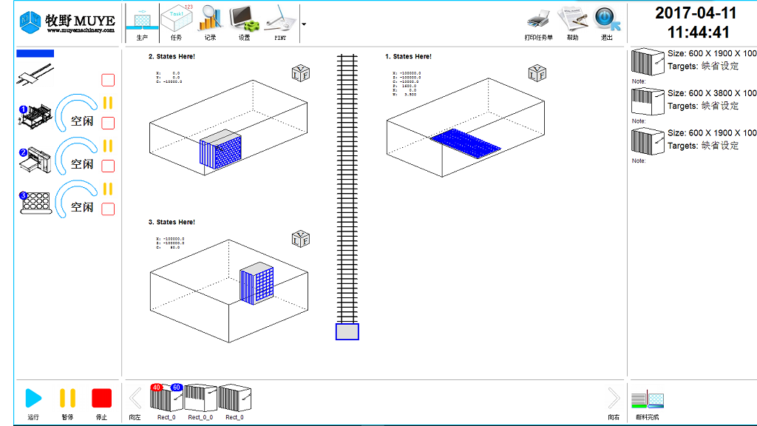
本公司提供了几个行业的自控系统上位机开发,主要提供界面友好和复杂数据处理能力,以及高复杂度的控制逻辑。下面是一个海绵切割机的上位机界面实例,除了基本的设备控制逻辑之外,系统提供了路径计算、多机同步、任务调度等方面的功能。
鱼眼镜头变换

这是一个针对视频辅助行车系统中,鱼眼镜头校正和拼接问题,所做的算法函数库。我们设计的视频辅助行车系统(通过安装在汽车前后左右的4路鱼眼摄像头输入的帧数据,经过一个变换模块,合成为一个显示汽车在中央、包括周围一定范围俯视图的帧数据)的关键在于系统的安装调试,设计目标的调试情节模式为:4S店等服务商或者车厂,在把基于甲方公司芯片的视频辅助行车系统安装到车辆上之后,进入系统调校模式,然后以较低速度通过斑马线,系统将自动识别若干关键帧以及其中的斑马线,并通过其尺寸和相对位置计算各个摄像头的校正参数,生成变换矩阵,而不用进行手动调节就可以纠正因为安装误差导致的图像变形和拼接错位等问题。
目前,本算法函数库已经完成鱼眼镜头的直接变换和手动校正拼接算法,同时也完成了比较关键的鱼眼镜头变换到小孔成像的变换算法,这个变换模型一旦建立,对整个系统的开发意义重大。在其基础上,系统调校将可以归结到各个镜头的安装位置和方向这6个参数的调整,从而使得自动拼接、定位等计算模型更加清晰和简化。(从小孔成像变换到垂直投影,可以通过上述6个参数确定。)其中,斑马线识别部分相对来说使我们成熟的技术,可以在示例途中看到识别到的虚线。
